|
Mise au point motorisé Il y a quelques temps, nous avions fait l’acquisition d'un système de mise au point basé sur des moteur à courant continu et des modules de chez HitecAstro. Cette solution est simple et pratique, le seul défaut est la précision. Après plusieurs semaines de recherche et d'échanges, il en ressort que la solution avec un moteur pas à pas est bien plus pratique et surtout la précision est meilleure. Les moteurs pas à pas existent en plusieurs modèles :
Pas très facile de s'y retrouver, mais pour faire simple, plus il y a de pas (exemple 200 pas veut dire que pour faire un tour complet, il y a 200 pas) plus la précision sera grande. Autre point important est le couple, c'est la force que le moteur peut donner pour avancer et reculer. Si nous avions un oculaire, le couple avec une valeur basse serait correcte, mais en astronomie le couple va être important en fonction des éléments qui seront en place. Dans notre cas, nous aurons à tracter :
Autre chose importante, notre télescope n'est pas toujours à l'horizontal, ceci entraine naturellement des contraintes et des forces. L'autre élément qui était important pour nous: La partie logiciel :
La solution que nous avons trouvé est basée sur les cartes Arduino :
Afin d'avoir une solution de taille réduite, nous avons fait le choix de la carte Arduino Nano
Afin de réduire encore les coûts, notre fournisseur était en Chine, attention, certains composants ne sont pas tout à fait les même que sur les cartes de référence Arduino. La carte Arduino seule fait beaucoup de chose, mais ne pourra pas commander le moteur pas à pas, c'est pour cela que qu'une carte additionnelle est nécessaire. Il en existe plusieurs mais la plus simple pour faire son premier montage est la EasyDriver 4.4. Cette carte pilote un moteur et elle est de même taille que l'Arduino Nano.
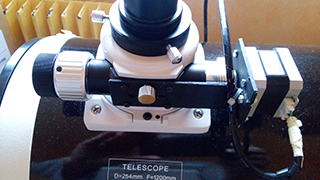
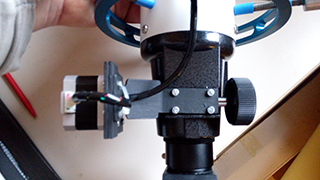
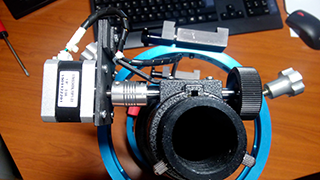
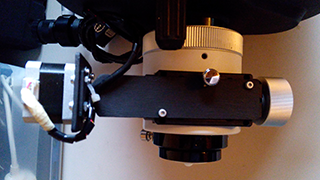
Dans notre cas, nous avions encore une chose à mettre au point, comment fixer le moteur sur le crayford. Nous avons commenceé par le Newton, ensuite la lunette de guidage et en dernier le C9.25 avec un crayford William Optics Nous avons fabriqué la pièce de liaison en acier que nous avons peint en noir, vous verrez ci-dessous les 3 pièces fabriquées pour les différents instruments.
Comlme vous pouvez le constater cette pièce nécessite parfois d'effectuer des pliage de tôle, cela a été le cas dans l'assemblage pour la lunette de guidage. L'axe du moteur et les trous de fixation sont décalés. Chaque montage est composé de deux pièces :
Maintenant, la partie montage électronique, il y a plusieurs projets pour la mise au point, j'ai sélectionné celui de Robert Brian Brown. Nous avons échangé à plusieurs reprises sur la partie matériel et logiciel, voici le lien pour que vous puissiez trouver votre bonheur : ICI Je vais dans cette partie vous donner une solution très simple de réalisation d'un système de mise au point sans achat de composants électroniques (pas de résistance, pas de condensateur; ...)
Dans notre version, nous avons ajouté un interrupteur afin que le montage soit propre pour la fonction marche/arrêt et un connecteur pour aller au moteur comme cela la solution est démontable et peut être rangée simplement.
La partie logiciel est simple à mettre en place, il faut télécharger l'IDE de chez Arduino : ICI A l'écriture cet article, la version disponible est la 1.6.6. Dans notre cas il faut aussi avoir quelques bibliothèque supplémentaires et les télécharger : Côté logiciel, voici celui que j'utilise pour cette version simplifiée : ICI Dans ce programme, il sera important de donner un nombre de pas moteur afin que celui-ci n'arrive pas en buté !
/!\ Il est très important de modifier les valeurs dans :
Si vos valeurs sont trop grandes, votre crayford va patiner et vos valeurs de mise au point seront mauvaises, et dans le pire des cas vous risquez de casser la crémaillère de votre crayford. Comment régler cela, il faut télécharger ce programme pour windows : ICI
Afin de terminer cet article, voici un lien sur le montage expliqué ci-dessus
|